Research
Assistive robotics
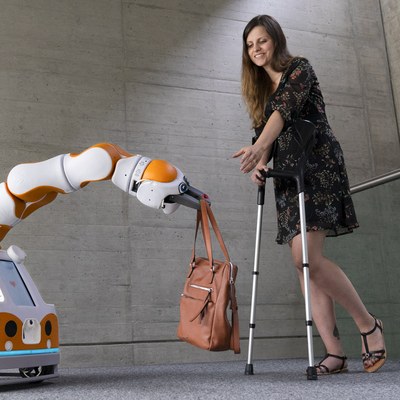
My current research at Idiap focuses on assistive robotics, exploring how robots such as the Lio robot can help people in need.
Interactive learning for manufacturing
A second axis of my current research relates to the use of Human-in-the-loop learning for predictive manufacturing and maintenance. I recently was awarded an Innosuisse project to explore this aspect in the PmPm Project in collaboraiton with HES-SO Valais's Smart Process Lab.
Natural interfaces for robotic autonomy
During the NASA ULI Effective Human-Robot Teaming to Advance Aviation Manufacturing project, we developped new flexible automation paradigms based on Human-Robot collaboration for aircraft manufacturing. With these systems, we can benefit from both the robots' ability to realize repetitive and streneous tasks, and the human flexibility to detect what can be done and if the process is success.
I was postdoc on this project, and my role was to coordinate and integrate work from a team of graduate students and project assistants. On top of this integration work, I research new interfaces and workflows to allow for flexible authoring of rich robotic behaviors by shop floor workers.
In Situ Live Programming for Human-Robot Collaboration (published at UIST 2021)
High-level remote teleoperation of robots (published in Frontiers in Robotics and AI)
Mechanisms for polite navigation
This project explored how robot should cross people in narrow corridors, specifically when there is not enough space for crossing and the human and the robot have to be close to each other. Results from our study showed that having the robot stopping on the side or moving forward had limited impact on the human. However, adding a rotation of the robot when crossing the person was rated as warmer and more likeable. Full paper available here.
Learning social strategies in teaching
To teach robots to interact with humans, during my PhD, I developed SPARC (for Supervised Progressively Autonomous Robot Competencies), a learning paradigm to teach robots policies in real world interactions. SPARC uses interactive machine learning and keeps a human in the action selection loop to ensure that each action executed by the robot is correct even in the early stages of the learning. SPARC relies on a selection/suggestion/correction mechanism whereby the human can select actions for the robot, the robot can suggest an action to the human who can either passively accept the action and let it be executed after a small delay or prevent it. This allow to rely importantly on the human at the start of the interaction when the robot is still learning how to interact. Then, as the robot improves its policy, its autonomy can increase, thus reducing need for the human to select actions for the robot. The main outcome of the research can be found here.
Robotic-Enhanced Therapy for Children with Autism
The DREAM Project was a large scale EU FT7 project exploring how we could use supervised autonomy to enhance Robot-Assisted Therapies for children with autism spectrum disorder. The goal of this project was twofold: (a) create a robust architecture for the robot allowing the robot to follow autonomous therapeutical scripts, reacting to the child's behavior in the context of and ABA therapy (b) use this system to perform the first large scale (N>50), long term study (over months) study comparing RET and standard ABA therapies for children with ASD. My role in the project was to implement a large part of the robot control architecture, and one of the key element of our system was to use a therapist to implicitly validate each of the robot's action. This allowed the therapist to preemptively correct the robot's actions in the case of a sensor failure, or child unexpected behavior, while no having to fully teleoperate the robot as a classic Wizard-of-Oz paradigm. The main paper describing our approach can be found here, and the general outcomes of the project will be published soon.

Long-Term Human-Robot Interaction for Cardiac Rehabilitation
This project is a collaboration between our team in the University of Plymouth and the Marcela Munera and Carlos A. Cifuentes in Colombian School of Engineering Julio Garavito focused on how Socially Assistive Robots could help patients to adhere better to a cardiac rehabilitation. The main question of this project was to found out factors or information that the robot could use to help motivate patient with the rehabilitation through continual monitoring, social feedback and personalization. Additional information can be found here, full results are under review.

Collaborators
I am currently (or have been) working with:
Shalutha Rajapakshe
Dr. Sylvain Calinon
Dr. Jean-Marc Odobez
Prof. Bilge Mutlu
Prof. Michael Gleicher
Michael Hagenow
Laura Stegner
Pragathi Praveena
Andrew Schoen
David Portfirio
Kevin Welsh
Prajna Bhat
Luis Molina
Titus Smith
Anna Konstant
Prof. Takayuki Kanda
Dr. Satoru Satake
Prof. Tony Belpaeme
Dr. Paul Baxter
Prof. Séverin Lemaignan
James Kennedy
Bahar İrfan
Christopher Wallbridge
Daniel Hernandez Garcia
Madeleine Bartlett
Thomas Colin
DREAM Project
Centre for Robotics and Neural
Systems